Машины для производства строительных материалов
Расчет мощности приводного двигателя. Для определения мощности привода пользуются эмпирическими формулами.
Формула Л. Б. Левенсона
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.9)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.9)
Где ![]() – предел прочности дробимого материала, Н/м2;
– предел прочности дробимого материала, Н/м2;
![]() – угловая скорость приводного вала, Рад/с;
– угловая скорость приводного вала, Рад/с;
![]() – длина камеры дробления, М;
– длина камеры дробления, М;
![]() – ширина загрузочного отверстия, М;
– ширина загрузочного отверстия, М;
![]() – ширина разгрузочной щели, М;
– ширина разгрузочной щели, М;
![]() – модуль упругости дробимого материала, Н/м2;
– модуль упругости дробимого материала, Н/м2;
Формула Беренова
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.10)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.10)
Где ![]() – коэффициент, принимаемый в зависимости от размеров загрузочного отверстия.
– коэффициент, принимаемый в зависимости от размеров загрузочного отверстия. ![]() при отверстиях < 250
при отверстиях < 250 ![]() 400 Мм;
400 Мм; ![]() при отверстиях, равных 250
при отверстиях, равных 250 ![]() 400…900
400…900 ![]() 1200 Мм, и
1200 Мм, и ![]() при отверстиях >900
при отверстиях >900 ![]() 1200 Мм;
1200 Мм;
Расчет шатуна. Конструктивный расчет.
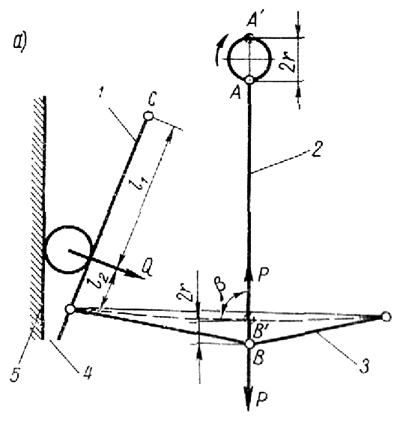
Рисунок 3.5 – Общая расчетная схема
Где, 1 – подвижная щека; 2 – шатун; 3 – распорная плита; 4 – разгрузочная щель; 5 – станина;
Шатун находится под воздействием растягивающих и изгибающих усилий. Растягивающие усилия возникают при движении шатуна от точки А К точке А', а изгибающие усилия возникают от действия инерционных сил при качании шатуна.
Исходным параметром для определения расчетного растягивающего усилия в шатуне является мощность приводного двигателя
Работа, совершаемая двигателем за один оборот приводного вала, должна соответствовать работе, совершаемой за это же время шатуном, т. е.
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.11)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.11)
Где ![]() - мощность двигателя, Вт;
- мощность двигателя, Вт;
![]() – угловая скорость приводного вала, Рад/с;
– угловая скорость приводного вала, Рад/с;
![]() – эксцентриситет приводного вала, М;
– эксцентриситет приводного вала, М;
![]() – среднее усилие в шатуне за один оборот приводного вала, Н;
– среднее усилие в шатуне за один оборот приводного вала, Н;
![]() – наибольшее усилие в шатуне за один оборот приводного вала, Н;
– наибольшее усилие в шатуне за один оборот приводного вала, Н;
Изменение величины усилия в шатуне происходит по закону прямой от 0 до ![]() – поэтому
– поэтому
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.12)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.12)
За расчетное усилие в шатуне принимают РMax, увеличенное на 30…50%, т. е.
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.13)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.13)
Напряжения ![]() в шатуне от действия растягивающих нагрузок равны
в шатуне от действия растягивающих нагрузок равны
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.14)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.14)
Где ![]() – площадь поперечного сечения шатуна, М2;
– площадь поперечного сечения шатуна, М2;
![]() – допускаемое напряжение на растяжения, Н/м2;
– допускаемое напряжение на растяжения, Н/м2;
Наибольшая величина изгибающих напряжений возникает в шатуне при расположении его перпендикулярно эксцентриковой части приводного вала. Величина ускорений точек шатуна изменяется по его длине в соответствии с законом треугольника.
Исходя из предположения, что масса шатуна равномерно распределена по его длине, расчет на изгиб сводится К Расчету двухопорной балки, нагруженной распределенной нагрузкой
Инерционные силы, действующие на шатун
Рисунок 3.6 – Расчетная схема
Наибольший изгибающий момент ![]() будет в сечении, отстоящем от точки
будет в сечении, отстоящем от точки ![]() на расстояние
на расстояние ![]() . Величина этого момента
. Величина этого момента
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.15)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.15)
Где ![]() – наибольшая величина инерционной нагрузки, действующей на единицу длины шатуна, Н/м;
– наибольшая величина инерционной нагрузки, действующей на единицу длины шатуна, Н/м;
![]() – длина шатуна, М.
– длина шатуна, М.
Подставляя в формулу (3.15) значение  , получим
, получим
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.16)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.16)
Где ![]() – сила тяжести, единицы объема шатуна, Н/м3;
– сила тяжести, единицы объема шатуна, Н/м3;
![]() – объем шатуна, М3;
– объем шатуна, М3;
![]() – угловая скорость шатуна в точке А, Рад/с;
– угловая скорость шатуна в точке А, Рад/с;
![]() – эксцентриситет приводного вала, М;
– эксцентриситет приводного вала, М;
![]() – площадь поперечного сечения шатуна, М2;
– площадь поперечного сечения шатуна, М2;
![]() – ускорение свободного падения, М/с2;
– ускорение свободного падения, М/с2;
Окончательно наибольшее нормальное напряжение, возникающее в опасном сечении шатуна, определится по формуле
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.17)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.17)
Где ![]() – момент сопротивления поперечного сечения шатуна, м3.
– момент сопротивления поперечного сечения шатуна, м3.
Расчет распорных плит. Расчет распорных плит ведется по наибольшей величине сжимаемого усилия ТMax И изгибающему моменту М, Возникающему от приложения этой силы (рис. 3.7)
Силы действующие в распорных плитах

Рисунок 3.7 – Расчетная схема
Наибольшее сжимающее, усилие Tmax, возникающее в распорной плите, при расположении шатуна в точке А' (см. общую схему) можно определить из выражения
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.18)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.18)
Где ![]() – угол между шатуном и распорной плитой при нахождении шатуна в точке
– угол между шатуном и распорной плитой при нахождении шатуна в точке ![]() .
.
Наиболее выгодное значение угла ![]() принимаются в диапазоне 80…88°, так как при этом подвижной щеке передаются наибольшие расчетные усилия.
принимаются в диапазоне 80…88°, так как при этом подвижной щеке передаются наибольшие расчетные усилия.
Угол ![]() должен быть обязательно меньше 90°, так как при
должен быть обязательно меньше 90°, так как при ![]() = 90°
= 90° ![]() возрастает до ∞ и может произойти поломка машины.
возрастает до ∞ и может произойти поломка машины.
Суммарное напряжение ![]() , возникающее в распорной плите, определится
, возникающее в распорной плите, определится
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.19)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.19)
Где ![]() – изгибающий момент, Нм;
– изгибающий момент, Нм;
![]() – момент сопротивления сечения, М3;
– момент сопротивления сечения, М3;
![]() – расстояние от точки приложения
– расстояние от точки приложения ![]() по продольной оси распорной плиты, М;
по продольной оси распорной плиты, М;
![]() – чистая площадь сечения распорной плиты, М2;
– чистая площадь сечения распорной плиты, М2;
Коэффициент устойчивости распорной плиты
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.20)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.20)
Где ![]() – длина распорной плиты, М;
– длина распорной плиты, М;
![]() – радиус инерции плиты, М;
– радиус инерции плиты, М;
![]() – коэффициент, зависящий от способа закрепления плиты.
– коэффициент, зависящий от способа закрепления плиты.
Расчет подвижной щеки. Усилие ![]() , передаваемое распорной плитой подвижной щеке, может быть разложено на две составляющие:
, передаваемое распорной плитой подвижной щеке, может быть разложено на две составляющие: ![]() , нормальную к поверхности щеки, и
, нормальную к поверхности щеки, и ![]() , действующую вдоль щеки.
, действующую вдоль щеки.
Угол ![]() между
между ![]() и
и ![]() равен
равен
![]() ,
,
Тогда
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.21)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.21)
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.22)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.22)
Величина равнодействующей сопротивления измельчаемого материала разрушению ![]() определяется из условия равновесия системы действующих сил относительно точки C подвеса щеки:
определяется из условия равновесия системы действующих сил относительно точки C подвеса щеки:
![]() ,
, ![]() ,
,
Где ![]() – расстояние от точки приложения силы Q до точки С, М;
– расстояние от точки приложения силы Q до точки С, М;
L – длина участка щеки между точкой С и распорной плитой, М.
Суммарное напряжение в щеке от совместного действия изгибающего усилия ![]() и растягивающего усилия
и растягивающего усилия ![]() равно:
равно:
а). при несимметричном сечении
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.23)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.23)
б). при симметричном сечении
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.24)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.24)
Где ![]() – изгибающий момент в опасном сечении щеки, Нм;
– изгибающий момент в опасном сечении щеки, Нм;
![]() – момент инерции сечения, М4;
– момент инерции сечения, М4;
![]() – расстояние наиболее удаленной точки сечения от нейтральной оси, М;
– расстояние наиболее удаленной точки сечения от нейтральной оси, М;
![]() – момент сопротивления сечения, М3;
– момент сопротивления сечения, М3;
![]() – площадь поперечного сечения щеки, М2;
– площадь поперечного сечения щеки, М2;
Расчет станины. При работе дробилки поперечные стенки закрытой станины (цельнолитой или сварной) воспринимают нагрузки, передаваемые им дробящим щекам, которые равны по величине и приложены сосредоточено (рис. 3.8).
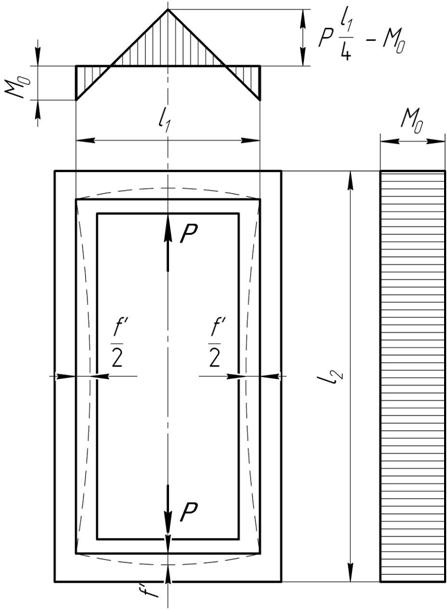
Рисунок 3.8 – Расчетная схема станины дробилки
При упрощенном расчете станина рассматривается как упругая симметричная рама прямоугольной формы, состоящая из двух стоек. Поперечные стенки станины рассматриваются как балки на двух опорах, нагруженные силой ![]() и статически неопределимые моментами
и статически неопределимые моментами ![]() , которые возникают от изгибающего действия силы
, которые возникают от изгибающего действия силы ![]() за счет жесткого соединения станины.
за счет жесткого соединения станины.
В стойках наибольшие напряжения будут на поверхности со стороны окна станины. Стойки можно рассматривать как балки, нагруженные на концах статически неопределимыми моментами ![]() .
.
Наибольшие напряжения в стойках определяются из выражения
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.25)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.25)
Где ![]() – коэффициент концентрации напряжений;
– коэффициент концентрации напряжений;
![]() – площадь поперечного сечения стойки станины, М2;
– площадь поперечного сечения стойки станины, М2;
![]() – момент сопротивления стойки, М3.
– момент сопротивления стойки, М3.
Статически неопределимый момент ![]() равен
равен
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.26)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.26)
Где ![]() и
и ![]() – соответственно длины поперечин и стоек станины, М;
– соответственно длины поперечин и стоек станины, М;
![]() и
и ![]() – средние моменты инерции поперечины и стойки, М4.
– средние моменты инерции поперечины и стойки, М4.
Поперечины станины подвергаются только изгибу.
Наибольший изгибающий момент, действующий посредине поперечины, равен
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.27)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.27)
Деформация станины закрытого типа вдоль продольной оси равна
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.28)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.28)
Где ![]() ,
, ![]() ,
, ![]() – соответственно деформации от действия изгибающих моментов, растягивающих и поперечных (перерезывающих) сил равны:
– соответственно деформации от действия изгибающих моментов, растягивающих и поперечных (перерезывающих) сил равны:
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.29)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.29)
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.30)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.30)
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.31)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.31)
В приведенных формулах ![]() – модуль упругости, Н/м2;
– модуль упругости, Н/м2;
![]() ,
, ![]() – площади поперечных сечений поперечин и стоек, М2;
– площади поперечных сечений поперечин и стоек, М2;
![]() – модуль сдвига, Н/м2;
– модуль сдвига, Н/м2;
![]() – коэффициент, зависящий от формы сечения поперечины станины (для прямоугольного сечения
– коэффициент, зависящий от формы сечения поперечины станины (для прямоугольного сечения ![]() ).
).
Наибольшая предельная деформация станины не должна превышать 1 Мм.
Поперечная деформация станины от действия момента ![]() определяется из выражения
определяется из выражения
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.32)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.32)
Расчет маховика. Для выравнивания нагрузки на двигатель и сглаживания динамичности нагрузок на звенья механизма на приводном валу щековых дробилок устанавливают один или два маховика. Маховики во время холостого полухода разгоняются и запасают в себе энергию, а при рабочем полуходе, когда идет дробление, отдают энергию.
Энергия, которую маховики накапливают или отдают, определяется по формуле
![]() MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.33)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.33)
Где ![]() – энергия маховика, Дж;
– энергия маховика, Дж;
![]() ,
, ![]() – угловые скорости маховика в конце и в начале холостого полухода, Рад/с;
– угловые скорости маховика в конце и в начале холостого полухода, Рад/с;
![]() – момент инерции массы маховика, Кг×М2;
– момент инерции массы маховика, Кг×М2;
Приняв во внимание, что при расчете щековых дробилок энергия, которую выдает маховик, должна быть равна примерно половине работы, необходимой на дробление, т. е. ![]() , можно определить момент инерции маховика по формуле
, можно определить момент инерции маховика по формуле
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.34)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.34)
Проведя преобразование по формуле GOTOBUTTON ZEqnNum934408 * MERGEFORMAT (3.34) и учтя, что  является степенью неравномерности хода, которая для щековых дробилок принимается равно
является степенью неравномерности хода, которая для щековых дробилок принимается равно ![]() , и
, и ![]() , будем иметь
, будем иметь
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.35)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.35)
Зная, что ![]() , находим массу маховиков
, находим массу маховиков
 MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.36)
MACROBUTTON MTPlaceRef * MERGEFORMAT SEQ MTEqn h * MERGEFORMAT (3.36)
Радиусом маховика ![]() предварительно следует задаться для того, чтобы окружная скорость обода маховика не превышала 25…30 М/с.
предварительно следует задаться для того, чтобы окружная скорость обода маховика не превышала 25…30 М/с.