Частотно регулируемый электропривод
Производим и продаем частотные преобразователи:
Цены на преобразователи частоты(21.01.16г.):
Частотники одна фаза в три:
Модель Мощность Цена
CFM110 0.25кВт 2300грн
CFM110 0.37кВт 2400грн
CFM110 0.55кВт 2500грн
CFM210 1,0 кВт 3200грн
CFM210 1,5 кВт 3400грн
CFM210 2,2 кВт 4000грн
CFM210 3,3 кВт 4300грн
AFM210 7,5 кВт 9900грн (единственный на рынке частотник 220 в 380 мощностью 7,5кВт)
Частотники 380В три фазы в три:
CFM310 4.0 кВт 6800грн
CFM310 5.5 кВт 7500грн
CFM310 7.5 кВт 8500грн
Контакты для заказов частотных преобразователей:
+38 050 4571330
chastotnik@msd.com.ua
|
ПЧ - преобразователь частоты ИО - исполнительный орган "ЧРП - частотно регулируемый электропривод РнсД. |
Современный частотно регулируемый электропривод состоит из асинхронного или синхронного электрического двигателя и преобразователя частоты (см. рис.1.).
Электрический двигатель преобразует электрическую энергию в
механическую энергию и приводит в движение исполнительный орган технологического механизма.
Преобразователь частоты управляет электрическим двигателем и представляет собой электронное статическое устройство. На выходе преобразователя формируется электрическое напряжение с переменными амплитудой и частотой.
Название «частотно регулируемый электропривод» обусловлено тем, что регулирование скорости вращения двигателя осуществляется изменением частоты напряжения питания, подаваемого на двигатель от преобразователя частоты.
На протяжении последних 10 -15 лет в мире наблюдается широкое и успешное внедрение частотно регулируемого электропривода для решения различных технологических задач во многие отрасли экономики. Это объясняется в первую очередь разработкой и созданием преобразователей частоты на принципиально новой элементной базе, главным образом на биполярных транзисторах с изолированным затвором IGBT.
В настоящей статье коротко описаны известные сегодня типы преобразователей частоты, применяемые в частотно регулируемом электроприводе, реализованные в них методы управления, их особенности и характеристики.
При дальнейших рассуждениях будем говорить о трехфазном частотно регулируемом электроприводе, так как он имеет наибольшее промышленное применение.
О методах управления
В синхронном электрическом двигателе частота вращения ротора в
установившемся режиме равна частоте вращения магнитного поля статора.
В асинхронном электрическом двигателе частота вращения ротора
в
установившемся режиме отличается от частоты вращения на величину скольжения.
Частота вращения магнитного поля зависит от частоты напряжения питания.
При питании обмотки статора электрического двигателя трехфазным напряжением с частотой создается вращающееся магнитное поле. Скорость вращения этого поля определяется по известной формуле
2 П f
|
|
где - число пар полюсов статора.
Переход от скорости вращения поля, измеряемой в радианах, к частоте вращения, выраженной в оборотах в минуту, осуществляется по следующей формуле
= —
2л!’
где 60 - коэффициент пересчета размерности.
Подставив в это уравнение скорость вращения поля, получим, что
Таким образом, частота вращения ротора синхронного и асинхронного двигателей зависит от частоты напряжения питания.
На этой зависимости и основан метод частотного регулирования.
Изменяя с помощью преобразователя частоту на входе двигателя, мы регулируем частоту вращения ротора.
В наиболее распространенном частотно регулируемом приводе на основе асинхронных двигателей с короткозамкнутым ротором применяются скалярное и векторное частотное управление.
При скалярном управлении по определенному закону изменяют амплитуду и частоту приложенного к двигателю напряжения. Изменение частоты питающего напряжения приводит к отклонению от расчетных значений максимального и пускового моментов двигателя, к. п.д., коэффициента мощности. Поэтому для поддержания требуемых рабочих характеристик двигателя необходимо с изменением частоты одновременно соответственно изменять и амплитуду напряжения.
В существующих преобразователях частоты при скалярном управлении чаще всего поддерживается постоянным отношение максимального момента двигателя к моменту сопротивления на валу. То есть при изменении частоты амплитуда напряжения изменяется таким образом, что отношение максимального момента двигателя к текущему моменту нагрузки остается неизменным. Это отношение называется перегрузочная способность двигателя.
При постоянстве перегрузочной способности номинальные коэффициент мощности и к. п.д. двигателя на всем диапазоне регулирования частоты вращения практически не изменяются.
|
|
Максимальный момент, развиваемый двигателем, определяется следующей зависимостью
где - постоянный коэффициент.
Поэтому зависимость напряжения питания от частоты определяется характером нагрузки на валу электрического двигателя.
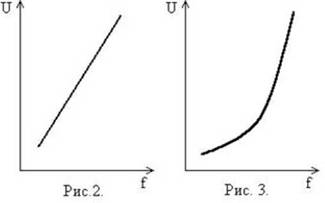
Для постоянного момента нагрузки поддерживается отношение U/f = const, и, по сути, обеспечивается постоянство максимального момента двигателя. Характер зависимости напряжения питания от частоты для случая с постоянным моментом нагрузки изображен на рис. 2. Угол наклона прямой на графике зависит от величин момента сопротивления и максимального крутящего момента двигателя.
Вместе с тем на малых частотах, начиная с некоторого значения частоты, максимальный момент двигателя начинает падать. Для компенсации этого и для увеличения пускового момента используется повышение уровня напряжения питания.
В случае вентиляторной нагрузки реализуется зависимость U/f2 = const. Характер зависимости напряжения питания от частоты для этого случая показан на рис.3. При регулировании в области малых частот максимальный момент также уменьшается, но для данного типа нагрузки это некритично.
Используя зависимость максимального крутящего момента от напряжения и частоты, можно построить график U от f для любого типа нагрузки.
Важным достоинством скалярного метода является возможность одновременного управления группой электродвигателей.
Скалярное управление достаточно для большинства практических случаев применения частотно регулируемого электропривода с диапазоном регулирования частоты вращения двигателя до 1:40.
Векторное управление позволяет существенно увеличить диапазон управления, точность регулирования, повысить быстродействие электропривода. Этот метод обеспечивает непосредственное управление вращающим моментом двигателя.
Вращающий момент определяется током статора, который создает возбуждающее магнитное поле. При непосредственном управлении моментом
необходимо изменять кроме амплитуды и фазу статорного тока, то есть вектор тока. Этим и обусловлен термин «векторное управление».
Для управления вектором тока, а, следовательно, положением магнитного потока статора относительно вращающегося ротора требуется знать точное положение ротора в любой момент времени. Задача решается либо с помощью выносного датчика положения ротора, либо определением положения ротора путем вычислений по другим параметрам двигателя. В качестве этих параметров используются токи и напряжения статорных обмоток.
Менее дорогим является частотно регулируемый электропривод с векторным управлением без датчика обратной связи скорости, однако векторное управление при этом требует большого объема и высокой скорости вычислений от преобразователя частоты.
Кроме того, для непосредственного управления моментом при малых, близких к нулевым скоростям вращения работа частотно регулируемого электропривода без обратной связи по скорости невозможна.
Векторное управление с датчиком обратной связи скорости обеспечивает диапазон регулирования до 1:1000 и выше, точность регулирования по скорости - сотые доли процента, точность по моменту - единицы процентов.
В синхронном частотно регулируемом приводе применяются те же методы управления, что и в асинхронном.
Однако в чистом виде частотное регулирование частоты вращения синхронных двигателей применяется только при малых мощностях, когда нагрузочные моменты невелики, и мала инерция приводного механизма. При больших мощностях этим условиям полностью отвечает лишь привод с вентиляторной нагрузкой. В случаях с другими типами нагрузки двигатель может выпасть из синхронизма.
Для синхронных электроприводов большой мощности применяется метод частотного управления с самосинхронизацией, который исключает выпадение двигателя из синхронизма. Особенность метода состоит в том, что управление преобразователем частоты осуществляется в строгом соответствии с положением ротора двигателя.
Преобразователь частоты - это устройство, предназначенное для преобразования переменного тока (напряжения) одной частоты в переменный ток (напряжение) другой частоты.
Выходная частота в современных преобразователях может изменяться в широком диапазоне и быть как выше, так и ниже частоты питающей сети.
Схема любого преобразователя частоты состоит из силовой и управляющей частей. Силовая часть преобразователей обычно выполнена на тиристорах или транзисторах, которые работают в режиме электронных ключей. Управляющая часть выполняется на цифровых микропроцессорах и обеспечивает управление силовыми
электронными ключами, а также решение большого количества вспомогательных задач (контроль, диагностика, защита).
|
части |
Преобразователи частоты,
применяемые в регулируемом
электроприводе, в зависимости от структуры и принципа работы силовой разделяются на два класса:
1. Преобразователи частоты с явно выраженным промежуточным звеном постоянного тока.
2. Преобразователи частоты с непосредственной связью (без промежуточного звена постоянного тока).
Каждый из существующих классов преобразователей имеет свои достоинства и недостатки, которые определяют область рационального применения каждого из них.
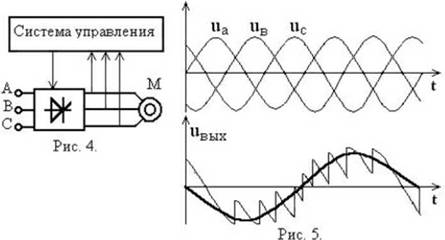
Исторически первыми появились преобразователи с непосредственной связью
(рис. 4.), в которых силовая часть представляет собой управляемый выпрямитель и выполнена на не запираемых тиристорах. Система управления поочередно отпирает группы тиристотров и подключает статорные обмотки двигателя к питающей сети.
Таким образом, выходное напряжение преобразователя формируется из «вырезанных» участков синусоид входного напряжения. На рис.5. показан пример формирования выходного напряжения для одной из фаз нагрузки. На входе преобразователя действует трехфазное синусоидальное напряжение иа, ив, ис. Выходное напряжение ивь1х имеет несинусоидальную «пилообразную» форму, которую условно можно аппроксимировать синусоидой (утолщенная линия). Из рисунка видно, что частота выходного напряжения не может быть равна или выше частоты питающей сети. Она находится в диапазоне от 0 до 30 Гц. Как следствие малый диапазон управления частоты вращения двигателя (не более 1 : 10). Это ограничение не позволяет применять такие преобразователи в современных частотно регулируемых приводах с широким диапазоном регулирования технологических параметров.
Использование не запираемых тиристоров требует относительно сложных систем управления, которые увеличивают стоимость преобразователя.
«Резаная» синусоида на выходе преобразователя является источником высших гармоник, которые вызывают дополнительные потери в электрическом двигателе, перегрев электрической машины, снижение момента, очень сильные помехи в питающей сети. Применение компенсирующих устройств приводит к повышению стоимости, массы, габаритов, понижению к. п.д. системы в целом.
Наряду с перечисленными недостатками преобразователей с непосредственной связью, они имеют определенные достоинства. К ним относятся:
- практически самый высокий КПД относительно других преобразователей (98,5% и выше),
- способность работать с большими напряжениями и токами, что делает возможным их использование в мощных высоковольтных приводах,
|
|
- относительная дешевизна, несмотря на увеличение абсолютной стоимости за счет схем управления и дополнительного оборудования.
Подобные схемы преобразователей используются в старых приводах и новые конструкции их практически не разрабатываются.
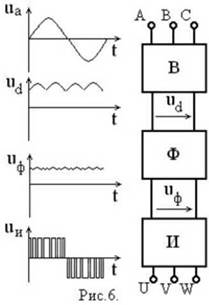
Наиболее широкое применение в современных частотно регулируемых приводах находят преобразователи с явно выраженным звеном постоянного тока (рис. 6.).
В преобразователях этого класса используется двойное преобразование электрической энергии: входное синусоидальное напряжение с постоянной амплитудой и частотой выпрямляется в выпрямителе (В), фильтруется фильтром (Ф), сглаживается, а затем вновь преобразуется инвертором (И) в переменное напряжение изменяемой частоты и амплитуды. Двойное преобразование энергии приводит к снижению к. п.д. и к некоторому ухудшению массогабаритных показателей по отношению к преобразователям с непосредственной связью.
Для формирования синусоидального переменного напряжения используются автономные инверторы напряжения и автономные инверторы тока.
В качестве электронных ключей в инверторах применяются запираемые тиристоры GTO и их усовершенствованные модификации GCT, IGCT, SGCT, и биполярные транзисторы с изолированным затвором IGBT.
Главным достоинством тиристорных преобразователей частоты, как и в схеме с непосредственной связью, является способность работать с большими токами и напряжениями, выдерживая при этом продолжительную нагрузку и импульсные воздействия.
Они имеют более высокий КПД (до 98%) по отношению к преобразователям на IGBT транзисторах (95 - 98%).
Преобразователи частоты на тиристорах в настоящее время занимают доминирующее положение в высоковольтном приводе в диапазоне мощностей от сотен киловатт и до десятков мегаватт с выходным напряжением 3 - 10 кВ и выше. Однако их цена на один кВт выходной мощности самая большая в классе высоковольтных преобразователей.
До недавнего прошлого преобразователи частоты на GTO составляли основную долю и в низковольтном частотно регулируемом приводе. Но с появлением IGBT транзисторов произошел «естественный отбор» и сегодня преобразователи на их базе общепризнанные лидеры в области низковольтного частотно регулируемого привода.
Тиристор является полууправляемым приборам: для его включения достаточно подать короткий импульс на управляющий вывод, но для выключения необходимо либо приложить к нему обратное напряжение, либо снизить коммутируемый ток до нуля. Для
этого в тиристорном преобразователе частоты требуется сложная и громоздкая система управления.
Биполярные транзисторы с изолированным затвором IGBT отличают от тиристоров полная управляемость, простая неэнергоемкая система управления, самая высокая рабочая частота
Вследствие этого преобразователи частоты на IGBT позволяют расширить диапазон управления скорости вращения двигателя, повысить быстродействие привода в целом.
Для асинхронного электропривода с векторным управлением преобразователи на IGBT позволяют работать на низких скоростях без датчика обратной связи.
Применение IGBT с более высокой частотой переключения в совокупности с микропроцессорной системой управления в преобразователях частоты снижает уровень высших гармоник, характерных для тиристорных преобразователей. Как следствие меньшие добавочные потери в обмотках и магнитопроводе электродвигателя, уменьшение нагрева электрической машины, снижение пульсаций момента и исключение так называемого «шагания» ротора в области малых частот. Снижаются потери в трансформаторах, конденсаторных батареях, увеличивается их срок службы и изоляции проводов, уменьшаются количество ложных срабатываний устройств защиты и погрешности индукционных измерительных приборов.
Преобразователи на транзисторах IGBT по сравнению с тиристорными преобразователями при одинаковой выходной мощности отличаются меньшими габаритами, массой, повышенной надежностью в силу модульного исполнения электронных ключей, лучшего теплоотвода с поверхности модуля и меньшего количества конструктивных элементов.
Они позволяют реализовать более полную защиту от бросков тока и от перенапряжения, что существенно снижает вероятность отказов и повреждений электропривода.
На настоящий момент низковольтные преобразователи на IGBT имеют более высокую цену на единицу выходной мощности, вследствие относительной сложности производства транзисторных модулей. Однако по соотношению цена/качество, исходя из перечисленных достоинств, они явно выигрывают у тиристорных преобразователей, кроме того, на протяжении последних лет наблюдается неуклонное снижение цен на IGBT модули.
Главным препятствием на пути их использования в высоковольтном приводе с прямым преобразованием частоты и при мощностях выше 1 - 2 МВт на настоящий момент являются технологические ограничения. Увеличение коммутируемого напряжения и рабочего тока приводит к увеличению размеров транзисторного модуля, а также требует более эффективного отвода тепла от кремниевого кристалла.
Новые технологии производства биполярных транзисторов направлены на преодоление этих ограничений, и перспективность применения IGBT очень высока также и в высоковольтном приводе. В настоящее время IGBT транзисторы применяются в высоковольтных преобразователях в виде последовательно соединенных нескольких
Структура и принцип работы низковольтного преобразователя частоты на GBT транзисторах
Типовая схема низковольтного преобразователя частоты представлена на рис. 7. В нижней части рисунка изображены графики напряжений и токов на выходе каждого элемента преобразователя.
Переменное напряжение питающей сети (ивх.) с постоянной амплитудой и частотой (UEx = const, f^ = const) поступает на управляемый или неуправляемый выпрямитель (1).
Для сглаживания пульсаций выпрямленного напряжения (ивыпр.) используется фильтр (2). Выпрямитель и емкостный фильтр (2) образуют звено постоянного тока.
С выхода фильтра постоянное напряжение ud поступает на вход автономного импульсного инвертора (3).
Автономный инвертор современных низковольтных преобразователей, как было отмечено, выполняется на основе силовых биполярных транзисторов с изолированным затвором IGBT. На рассматриваемом рисунке изображена схема преобразователя частоты с автономным инвертором напряжения как получившая наибольшее распространение.
|
ЗВЕ МО ПС хт<)A\U IQTOTOKAj |

|
Рік 7 |

В инверторе осуществляется преобразование постоянного напряжения ud в трехфазное (или однофазное) импульсное напряжение ии изменяемой амплитуды и частоты. По сигналам системы управления каждая обмотка электрического двигателя подсоединяется через соответствующие силовые транзисторы инвертора к положительному и отрицательному полюсам звена постоянного тока.
Длительность подключения каждой обмотки в пределах периода следования импульсов модулируется по синусоидальному закону. Наибольшая ширина импульсов обеспечивается в середине полупериода, а к началу и концу полупериода уменьшается. Таким образом, система управления обеспечивает широтно-импульсную модуляцию (ШИМ) напряжения, прикладываемого к обмоткам двигателя. Амплитуда и частота напряжения определяются параметрами модулирующей синусоидальной функции.
При высокой несущей частоте ШИМ (2 ... 15 кГц) обмотки двигателя вследствие их высокой индуктивности работают как фильтр. Поэтому в них протекают практически синусоидальные токи.
В схемах преобразователей с управляемым выпрямителем (1) изменение амплитуды напряжения uH может достигаться регулированием величины постоянного напряжения ud, а изменение частоты - режимом работы инвертора.
При необходимости на выходе автономного инвертора устанавливается фильтр (4) для сглаживания пульсаций тока. (В схемах преобразователей на IGBT в силу низкого уровня высших гармоник в выходном напряжении потребность в фильтре практически отсутствует.)
Таким образом, на выходе преобразователя частоты формируется трехфазное (или однофазное) переменное напряжение изменяемой частоты и амплитуды (ивых = var, ^ых = var).
Типовые схемы высоковольтных преобразователей частоты
В последние годы многие фирмы большое внимание, которое диктуется потребностями рынка, уделяют разработке и созданию высоковольтных частотных преобразователей. Требуемая величина выходного напряжения преобразователя частоты для высоковольтного электропривода достигает 10 кВ и выше при мощности до нескольких десятков мегаватт.
Для таких напряжений и мощностей при прямом преобразовании частоты применяются весьма дорогие тиристорные силовые электронные ключи со сложными схемами управления. Подключение преобразователя к сети осуществляется либо через входной токоограничивающий реактор, либо через согласующий трансформатор.
Предельные напряжение и ток единичного электронного ключа ограничены, поэтому применяют специальные схемные решения для повышения выходного напряжения преобразователя. Кроме того, это позволяет уменьшить общую стоимость высоковольтных преобразователей частоты за счет использования низковольтных электронных ключей.
В преобразователях частоты различных фирм производителей используются следующие схемные решения.
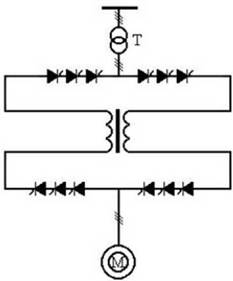
1. Двухтрансформаторная схема высоковольтного преобразователя частоты
|
|
|
|
|
|
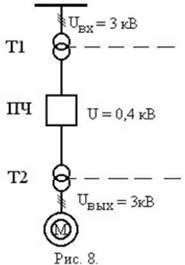
В схеме преобразователя (рис. 8.) осуществляется двойная трансформация напряжения с помощью понижающего (Т1) и повышающего (Т2) высоковольтных трансформаторов.
Двойная трансформация позволяет использовать для регулирования частоты Рис 9. относительно дешевый
низковольтный преобразователь частоты, структура которого представлена на рис. 7.
Преобразователи отличают относительная дешевизна и простота практической реализации. Вследствие этого они наиболее часто применяются для управления высоковольтными электродвигателями в диапазоне мощностей до 1 - 1,5 МВт. При большей мощности электропривода трансформатор Т2 вносит существенные искажения в процесс управления электродвигателем. Основными недостатками двухтрансформаторных преобразователей являются высокие массогабаритные характеристики, меньшие по отношению к другим схемам КПД (93 - 96%) и надежность.
Преобразователи, выполненные по этой схеме, имеют ограниченный диапазон регулирования частоты вращения двигателя как сверху, так и снизу от номинальной частоты.
При снижении частоты на выходе преобразователя увеличивается насыщение сердечника и нарушается расчетный режим работы выходного трансформатора Т2. Поэтому, как показывает практика, диапазон регулирования ограничен в пределах Пном>П>0,5Пном. Для расширения диапазона регулирования используют трансформаторы с увеличенным сечением магнитопровода, но это увеличивает стоимость, массу и габариты.
При увеличении выходной частоты растут потери в сердечнике трансформатора Т2 на перемагничивание и вихревые токи.
В приводах мощностью более 1 МВт и напряжении низковольтной части 0,4 - 0,6 кВ сечение кабеля между преобразователем частоты и низковольтной обмоткой трансформаторов должно быть рассчитано на токи до килоампер, что увеличивает массу преобразователя.
2. Схема преобразователя с последовательным включением электронных ключей
Для повышения рабочего напряжения преобразователя частоты электронные ключи соединяют последовательно (см. рис.9.).
Число элементов в каждом плече определяется величиной рабочего напряжения и типом элемента.
|
Рис. 10. |
Основная проблема для этой схемы состоит в строгом согласовании работы электронных ключей.
Полупроводниковые элементы, изготовленные даже в одной партии, имеют разброс параметров, поэтому очень остро стоит задача согласования их работы по времени. Если один из элементов откроется с задержкой или закроется раньше остальных, то к нему будет приложено полное напряжение плеча, и он выйдет из строя.
Для снижения уровня высших гармоник и улучшения электромагнитной совместимости используют многопульсные схемы преобразователей. Согласование преобразователя с питающей сетью осуществляется с помощью многообмоточных согласующих трансформаторов Т.
На рис.9. изображена 6-ти пульсная схема с двухобмоточным согласующим трансформатором. На практике существуют 12-ти, 18-ти, 24-х пульсные схемы
преобразователей. Число вторичных обмоток трансформаторов в этих схемах равно 2, 3, 4 соответственно.
Схема является наиболее распространенной для высоковольтных преобразователей большой мощности. Преобразователи имеют одни из лучших удельные массогабаритные показатели, диапазон изменения выходной частоты от 0 до 250-300 Гц, КПД преобразователей достигает 97,5%.
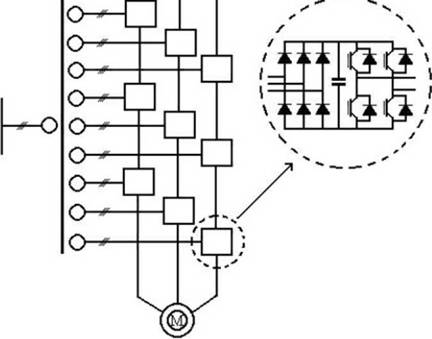
3. Схема преобразователя с многообмоточным трансформатором
Силовая схема преобразователя (рис.10.) состоит из многообмоточного трансформатора и электронных инверторных ячеек. Количество вторичных обмоток трансформаторов в известных схемах достигает 18. Вторичные обмотки электрически сдвинуты относительно друг друга.
Это позволяет использовать низковольтные инверторные ячейки. Ячейка выполняется по схеме: неуправляемый трехфазный выпрямитель, емкостной фильтр, однофазный инвертор на IGBT транзисторах.
Выходы ячеек соединяются последовательно. В приведенном примере каждая фаза питания электродвигателя содержит три ячейки.
По своим характеристикам преобразователи находятся ближе к схеме с последовательным включением электронных ключей.